恒磁通传感器工作原理,磁电传感器与霍尔传感器的结构和原理有什么不同
发布:小编
本文目录
磁性传感器的工作原理是什么
磁性传感器俗称为磁性开关,由感磁元件、电子电路为主要构成。透过感磁元件对‟磁”感应的特性,检测气缸内随活塞移动的磁环位置,进而达到侦测活塞杆动作位置的目的;在自动控制系统中,可作于限位、计数、定位控制和自动保护等功能使用。
按照磁性开关的设计原理,可分为有触点(磁簧管式Reed)和无触点(电子式 Solid state)两大类型。
有触点(磁簧管式Reed)磁性开关的原理是,透过磁簧管内的两个簧片,在感应到磁场时磁化并相互吸合,进而机械性地接触导通电路,并发出电子信号;而当磁场强度减弱,低过保持簧片吸合的强度时,则两簧片弹开,开关断开。
优点是能适应较广的电压范围,耐电压至240伏特,并可应用于交流/直流电;缺点是,磁簧管的玻璃薄且易碎,轻微碰撞都会使感度发生变异,开关也因此产生故障,稳定性较差。
无触点磁性开关是由全电子元器件组成,原理是透过专用磁阻IC的特性侦测气缸内磁环的位置,并输出驱动与开关信号。相较于磁簧式,电子式磁性开关具有感应精度更高,不会误动作、抗震动、抗冲击与使用寿命长等优点,;其缺点是耐受的电压较低,大部分无触点式开关仅能应用到直流30伏特的电压。
不过,ALIF品牌已成功于2020年研制出代号:‟DFV” 的电子式开关,能耐高压至 240伏特,并且适用于直流和交流电;可完美替换技术落后且易坏的磁簧管式开关。
磁电传感器与霍尔传感器的结构和原理有什么不同
§6-1 磁电式传感器
磁电式传感器(也称电磁感应传感器):它是基于电磁感应的传感器。利用导体和磁场发生相对运动而在导体两端输出感应电势。
特点:不需要供电电源,电路简单,性能稳定,输出阻抗小,输出电压灵敏度高。
§6-1-1 磁电式传感器的工作原理
一、 磁电式传感器的工作原理:
磁电式传感器的工作原理是基于法拉第电磁感应原理。当通过回路的磁通量发生变化时,回路中产生的感应电势与磁通量对时间变化率的负值成正比。
(6-1)
式中:Φ为线圈的磁通;N为线圈的匝数。
二、 线圈在恒定均匀磁场作直线运动并且切割磁力线时:
线圈的磁通: (6-2)
线圈两端感应电势: (6-3)
其中:θ:线圈运动方向与磁场方向的夹角; B V
B:磁感应强度;x:位移;l:每匝线圈的平均长度; θ
V:线圈与磁场相对运动的速度。
当θ=900时: (6-4)
三、线圈相对磁场旋转切割磁力线时:
线圈两端感应电势: (6-5)
其中,θ为线圈平面的法线方向与磁场方向的夹角;
A:线圈截面积;ω:旋转运动角速度。
当θ=900时: (6-6)
结论:当N、B、A、l为定值时,感应电动势e与线圈和磁场的相对运动速度v(或ω)成正比。
改变磁通方法或用线圈切割磁力线方法产生感应电动势,所以磁电式传感器可以分为变磁通式和恒磁通式两种类型。
§6-1-2 恒磁通式磁电传感器
一、工作原理:
气隙磁通保持不变,感应线圈与磁钢作相对运动,线圈切割磁力线产生感应电势。由式(6-3) 得到: 。
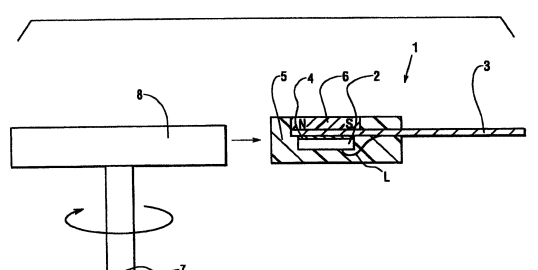
二、磁电式振动传感器:(图6-1所示)
图6-1 磁电式振动传感器的结构图
1-弹簧片 2-永久磁铁 3-阻尼器 4-引线 5-芯杆 6-外壳 7-线圈 8-弹簧片
1.
1.组成:
固定部分:永久磁铁、壳体。
可动部分:线圈、芯杆、阻尼环
弹簧片
2.工作原理:
壳体振动
线圈切割磁力线
感应电动势势
(1)传感器紧固在振动体上,外壳及磁铁与振动体一起震动。
(2)线圈与磁铁作相对运动而切割磁力线。
(3)线圈两端产生电动势,且 。
(4)e的大小就代表了v的大小。
(5)还可经过积分或微分电路测量位移或加速度。
§6-1-3 变磁通式电磁传感器
一、 工作原理:
产生磁场的永久磁铁和线圈都固定不动,通过磁通Φ的变化产生感应电动势e。变磁通式又称磁阻式,常用于角速度的测量。
二、磁电式转速传感器:(图6-2所示)
1.组成:
固定部分:磁铁、感应线圈、极靴。
可动部分:铁磁材料的旋转齿轮。
图6-2 磁电式转速传感器的结构图
1.永久磁铁;2.软铁极靴;3.感应线圈;4.齿轮
2.工作原理:
齿轮转动
气隙交替变化
磁阻变化
磁通变化
产生感应
电动势
由于传感齿轮每转过一个齿,感应电势经历了一个周期。所以,
周期T=转过一个齿所用的时间。
得: (6-7)
或: (6-8)
式中:T为感应电动势的周期;Z为齿轮齿数;n为转速;f为感应电动势的频率。从(6-8)式可得: 从测f得到转速n的值。
§6-2 霍尔传感器
霍尔传感器是利用半导体材料的霍尔效应实现磁电转换的一种传感器。这种传感器是一片矩形的P型半导体(称为霍尔元件),通常是由砷化铟(InAs)制成的。它可以直接测量磁场及微位移,也可以间接测量液位、压力等工业参数。
它具有灵敏度高、线性度和稳定性好、体积小、重量轻,频带宽,动态特性好、寿命长和耐高温等特性。
§6-2-1霍尔传感器的外形结构和性能
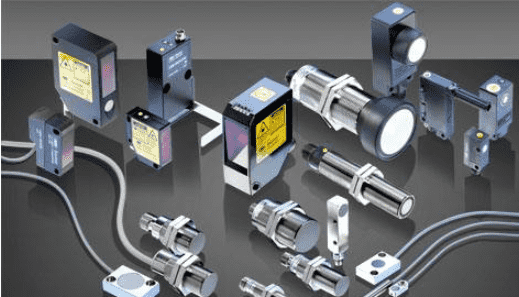
一、霍尔传感器的外形:(图6-3所示)
(a) (b) (c)
图6-3 霍尔传感器的外形图
(a)霍尔元件;(b)霍尔接近开关;(c)霍尔电流传感器
二、霍尔元件的结构和符号:
图6-4 霍尔元件
1.图6-4(a):从矩形薄片半导体基片上的两个相互垂直方向侧面上,引出一对电极,其中1-2电极用于加控制电流,称控制电极。另一对3-4电极用于引出霍尔电势,称霍尔电势输出极。在基片外面用金属或陶瓷、环氧树脂等封装作为外壳。
2.图6-4(b):霍尔元件的外形图。
3.图6-4(c):霍尔元件通用的图形符号。
三、霍尔接近开关介绍:
1.特点:
响应频率高,重复定位精度高,抗干扰能力强,多种保护功能,有工作状态指示灯,可以和编程控制器(PC)直接接口,高可靠性和长寿命等。
2.技术参数:
参数/型号
JK JB JZ
5002C
8002C
5002D
8002D
5020D
8020D
5050D
8050D
8100D
电源电压(V)
5~24
8~30
负载电流(mA)
20
200
500
1000
工作距离(mm)
5~7
8~11
5~7
8~11
5~7
8~11
5~7
8~11
8~11
输出低电平(V)
≤0.4
≤0.5
≤1.0
响应频率(KHz)
100
50
定位精度(mm)
0.02
指示灯
N/Y
Y
Y
Y
极性和浪涌保护
N
N
Y
Y
过热保护
Y
Y
Y
Y
输出方式
NPN
NPN/PNP
工作温度(℃)
I -40~+125 Ⅱ-25~+85
3.使用:
(1) 配套磁钢采用Φ8×4钕铁硼磁钢S面(表面磁感应强度为0.3T)。
(2) 接线方式:红:电源(Vcc);黄:输出(VOUT);黑:地线(GND)。
(3) 接线图:
图6-5 霍尔接近开关的接线图
4. 触发方式:
图6-6 霍尔接近开关的触发方式
§6-2-2霍尔传感器的工作原理
一、霍尔传感器的工作原理:
霍尔传感器的工作原理是基于霍尔效应。而霍尔效应是置于磁场中的导体或半导体中流过电流时,若是没有磁场的影响,则正电荷载流子能平稳地流过,此时,输出端(从载流导体上平行于电流和磁场方向的两个面引出)的电压为0。当加入一个与电流方向垂直的磁场时(图6-7所示),电荷载流子会由于洛伦慈力的作用而偏向一边,在输出端产生电压——霍尔电压。这一现象称为霍尔效应。
图6-7 霍尔电压的产生
二、 霍尔元件产生的霍尔电压大小的决定因素:
主要由三个方面的因素决定:
1. 电源提供的电流的大小。
2. 霍尔元件所处磁场的强度。
3. 霍尔元件的物理尺寸。霍尔电压是和元件厚度以及磁力线垂直穿过的横断面积成正比的。
由于霍尔元件的物理尺寸是不会变化的,因此
霍尔电压为: (6-9)
其中:KH为霍尔元件的灵敏度:
从上式得出:霍尔电压UH正比于I和B,当控制电流I恒定时,B越大,UH越大,B改变方向时,UH也改变方向;而当B恒定时,I变化时,UH也变化。
§6-2-3 霍尔传感器的测量电路及补偿
一、 测量电路:
图6-8 霍尔传感器的测量电路
二、温度误差及补偿:
由于霍尔元件的基片是半导体材料,因而对温度的变化很敏感。为了减小霍尔元件的温度误差,可采取:
1.选用温度系数小的元件。
2.采用恒温措施。
3.采用恒流源供电:
三、零位特性及补偿:
1.零位特性:在无外加磁场或无控制电流的情况下,元件产生输出电压的特性。
2.零位误差:零位特性产生的误差。
3.不等位电压:霍尔元件的激励电流为额定电流IN而磁感应强度为0时,所测得的空载霍尔电压UO。
4.不等位电阻R0:R0=UO/IN
不等位电压产生的主要原因:霍尔电极安装时不在同一个电位面上,两者之间存在不等位电阻。(图6-9所示)
IN
RO
UO
图6-9 不等位电阻的产生 图6-10 桥路补偿电路
补偿方法:利用桥路平衡的原理来补偿。见图6-10所示。
§6-2-4 霍尔传感器的应用
一、 测量磁场:
在控制电流恒定时,由于 ,霍尔电压与磁感应强度成正比。霍尔传感器特别适用于微小气隙中的磁感应强度、高梯度磁场参数的测量。
二、测量压力:
它是把压力先转换成位移后,再应用霍尔电压与位栘关系测量压力。
图6-11中作为压力敏感元件的弹簧片,其一端固定,另一端安装着霍尔元件,当输入压力增加时,弹簧伸长,使处于恒定梯度磁场中的霍尔元件产生相应的位移,从霍尔元件输出的电压的大小即可反映出压力的大小。且磁场梯度越大,输出霍尔电压对位移变化的灵敏度越高,磁场梯度越均匀,输出电压对位移的线性度就越好。
图6-11 霍尔压力传感器
a)弹簧片式;b)波纹管式
三、 测量转速:
当齿对准霍尔元件时,磁力线集中穿过霍尔元件,可产生较大的霍尔电动势,经过放大、整形后输出高电平;反之,当齿轮的空挡对准霍尔元件时,输出为低电平。(见图6-12所示)
S
磁铁
线性霍尔元件
图6-12 霍尔传感器测量转速 图6-13 霍尔接近开关
四、 霍尔接近开关:(图6-13所示)
当磁铁的有效磁极接近、并达到动作距离时,霍尔接近开关动作。霍尔接近开关还配一块钕铁硼磁铁。
当磁铁随运动部件移动到距霍尔接近开关几毫米时,霍尔IC的输出由高电平变为低电平,经驱动电路使继电器吸合或释放,控制运动部件停止移动,起到限位的作用。
五、霍尔电流传感器:
结构如图6-14所示 用一环形导磁材料制作成磁心,套在被测电流流过的导线上,在磁心上开一气隙,内置一个霍尔传感器。当导线中有电流流过时,便在磁心中感生磁场,霍尔元件受到磁场的作用,输出霍尔电压。导线中电流越大,磁场越强,输出霍尔电压越大。
当磁场恒定时,霍尔电压与控制电流之间呈线性关系,可用它直接测量电流——钳形电流表,
磁电式传感器工作原理是什么
1、磁电式传感器是利用电磁感应原理,将输入运动速度变换成感应电势输出的传感器。它不需要辅助电源,就能把被测对象的机械能转换成易于测量的电信号,是一种有源传感器。
2、磁电式传感器有时也称作电动式或感应式传感器, 它只适合进行动态测量。由于它有较大的输出功率,故配用电路较简单,零位及性能稳定。根据这一原理,可以设计成变磁通式和恒磁通式两种结构型式,构成测量线速度或角速度的磁电式传感器。
磁性传感器的工作原理
磁性传感器的工作原理是磁性探头工作时在周围形成一个静磁场,当铁磁金属制成的物体,如步枪、车辆等进入这个静磁场时,就会感应产生一个新的磁场,由于目标的运动变化所产生的干扰使磁场发生变化,引起磁力计指针的偏转及摆动,产生一个电信号,进而实现对携带武器的人和车辆的探测。
与其他传感器相比,磁性传感器还有一个突出特点,就是它能适应各种条件下的战场探测,特别适用于震动传感器难以探测的沼泽、滩头、水网等地区,从而弥补了震动传感器的不足。
但是磁性传感器的能源有限,这使得它的探测距离较近,一般对人员的探测距离为3~4m,对轮式车辆的探测距离为15m以内,对履带式车辆的探测距离为25m以内。
扩展资料
以程序控制、环境控制、医疗诊断为首的自动化工程目前已开始进入家庭的日常生活,获得信息并及时处理信息的重要性正在增大。
特别是最近,信息处理的主要场所已进入家庭的客厅和厨房。所有这些场合,情报信息的检测是先决条件,因此,传感器变得很重要。
使用传感器的各种场合很多,传感器的类型种类也很多。大体上可以分为电磁性和非电磁性两大类。电磁性的信息容易进行传递、记录、放大和计算等,也便于输入计算机。
可是,非电磁性的信号处理就很困难,必须把它们变换为磁性信号,作为这种变换方式磁性传感器是最有效的。
若在感应电动势中测量电路中接一积分电路,那么输出电动势就与位移量成正比关系;如果在测量电路中接一微分电路,则输出电动势就与运动的加速度成正比关系。
这样磁电式传感器除可测量速度外,还可用来测量运动的位移和加速度。磁电式传感器的输出量,除了电动势的幅值大小外,也可以是输出电动势的频率值,如磁电式转速表即为一个例子。
以上就是关于恒磁通传感器工作原理,磁电传感器与霍尔传感器的结构和原理有什么不同的全部内容,以及恒磁通传感器工作原理的相关内容,希望能够帮到您。
版权声明:本文来自用户投稿,不代表【推酷网】立场,本平台所发表的文章、图片属于原权利人所有,因客观原因,或会存在不当使用的情况,非恶意侵犯原权利人相关权益,敬请相关权利人谅解并与我们联系(邮箱:350149276@qq.com)我们将及时处理,共同维护良好的网络创作环境。
大家都在看

标致SUV有哪些,标致3008的车型定位是什么
综合百科标致3008的车型定位是什么标致3008的车型定位是紧凑型SUV。标致3008是东风标致汽车旗下推出的一款紧凑型SUV,这款车的官方指导价格为13.97-14.97万元。全新一代标致3008基于PSA集团最新的EMP2模块化平台打造,新一代车型的外观进行了大幅度的提升,整体的造型

怎么样把raw转换成jpg,怎样把raw格式转成jpg格式的
综合百科本文目录1.arw如何在线转化成jpg-如何用电脑将单反相机的RAW格式转化成JPEG格式2.raw格式照片怎么转换成jpg手机3.怎样将raw格式照片转换为JPG格式4.raw格式如何转换成jpgarw如何在线转化成jpg-如何用电脑将单反相机的RAW格式转化成JPEG格式怎么
苹果手机iphone 延时摄影怎么拍
综合百科苹果手机iphone 延时摄影怎么拍首先固定iphone 手机并打开相机软件,然后在下方的功能栏目往左划,选择延时摄影,最后点击拍摄即可。延时摄影是以一种将时间压缩的拍摄技术,目前也多叫作缩时录影。iPhone,是苹果公司旗下研发的智能手机系列,它搭载苹果公司研发的iOS手机作业
-
基金分红怎么算的
综合百科基金分红怎么算的基金分红是指基金将收益的一部分以现金形式派发给投资人,这部分收益原来就是基金单位净值的一部分。分红并不是越多越好,投资者应该选择适合自己需求的分红方式。基金分红计算方法:基金分红金额=持有份额*每份分红额度比如,某投资者持有基金10000份,该基金每份分红0.5元
劳动合同没到期被开除怎么赔偿,劳动合同未到期被辞退单位怎么赔偿一次性结清工资
综合百科本文目录1.劳动合同未到期被辞退单位怎么赔偿一次性结清工资吗2.劳动合同没到期被辞退怎么赔偿怎样计算3.合同未到期单位辞退员工怎么补偿4.合同未到期开除员工怎么赔偿劳动合同未到期被辞退单位怎么赔偿一次性结清工资吗一、劳动合同到期前被辞退如何赔偿?1.经劳动双方协商,由用人单位解除
微信投诉举报会封号,微信骂人举报会封号吗
综合百科微信投诉举报会封号吗?在微信里举报对方成功的话,对方会受到相应的惩罚,处罚的严重会根据违规的情节来定,如果情节严重,可能会导致封号,如果情节较轻,会给予对方警告处罚。微信朋友圈指的是腾讯微信上的一个社交功能,于微信4.0版本2012年4月19日更新时上线,用户可以通过朋友圈发表文
-
小米手机屏坏了怎么样一键换机,小米手机如何一键换机到苹果手机
综合百科小米手机屏坏了怎么样一键换机小米手机要一键换机,需要在手机设置里找到更多设置才能打开一键换机功能。如果手机屏已经不能显示,那么无法操作和使用一键换机。以小米CC9为例,一键换机操作流程如下:1、打开设置,点击更多设置。2、进入页面后点击小米换机。3、选择我是新手机或者旧手机。然后
笔记本按键失灵能修,笔记本电脑快捷键F1到F12失灵怎么办
综合百科笔记本按键失灵能修吗?笔记本按键失灵能修。用户可以带上笔记本去附近的电脑维修店进行维修即可。笔记本电脑(Laptop),简称笔记本,又被称为“便携式电脑,手提电脑、掌上电脑或膝上型电脑”,其最大的特点就是机身小巧,相比PC携带方便,是一种小型、可便于携带的个人电脑,通常重1-3公
-
法亚尔岛著名景点有哪些
综合百科法亚尔岛著名景点有哪些1、法亚尔岛的中心是一座形体完整的戈多(Gordo)火山。2、法亚尔(意为山毛榉树林)系以一度在当地生长茂盛的杨梅树命名,该岛的发现者当时误认其为山毛榉。3、该岛位于奥尔塔(Horta)行政区内,区首府奥尔塔镇为法亚尔岛上的主要港口。4、法亚尔岛主要出产有谷
-
佳能05怎么使用微距,佳能微距镜头怎么选
综合百科佳能105怎么使用微距镜头安装以后合一下焦,直接按快门就行了。微距摄影是摄影活动中比较大的一类,可以说,绝大多数从事摄影活动的人士或多或少都接触过微距摄影。微距摄影并不神秘,但是一些摄影爱好者对这类摄影方式有种不可捉摸的感觉,主要是从事了普通摄影之后,以为微距摄影是一种另类的方式

相机的闪光灯有什么用,闪光灯的用途有哪些
综合百科本文目录1.闪光灯的用途有哪些2.相机在拍照时射出的红光有什么用处3.外置闪光灯相机用什么模式使用4.用相机拍摄时为什么背景虚化不了闪光灯的用途有哪些用途:1、在光线不足的时候用闪光灯补光。2、在偏色的时候可以用闪光灯校正颜色。3、反差大的时候可以用闪光灯减小反差。闪光灯分为三类

下水道什么意思,dnf下水道职业是什么意思
综合百科本文目录1.dnf下水道职业是什么意思2.网络用语鸡肋是什么意思3.下水道警告是什么意思4.男人走下水道是什么意思dnf下水道职业是什么意思下水道:下水道是职业的排行的一种称谓,下水道职业就是指那些刷图、PK在相等投资下要比其他职业弱势很多的职业,想要刷图组队没人要,异界没人要,






